Общие сведения. Схема силовых цепей моторного вагона (рис. 169) позволяет производить реостатный пуск тяговых двигателей с переключением их в процессе пуска с последовательного на последовательно-параллельное соединение. Переход осуществляется по мостовой схеме без разрыва цепи. На каждом из двух соединений предусмотрено двухступенчатое ослабление возбуждения тяговых двигателей шунтированием их обмоток возбуждения. Схема предусматривает реверсирование тяговых двигателей с помощью группового реверсивного переключателя, а также защиту их от коротких замыканий, перегрузок, перенапряжений и боксования. Система управления двигателями групповая.
Аппаратом управления тяговыми двигателями является силовой реостатный контроллер (РК) с пневматическим приводом и односторонним вращением. Вращение вала РК осуществляется под контролем реле ускорения (РУ). Силовой контроллер в процессе разгона поезда обеспечивает изменение сопротивления пусковых резисторов и ослабление возбуждения тяговых двигателей. Для этой цели он имеет 18 позиций (см. таблицу замыканий контакторов на рис. 169). Из них первые восемь — позиции реостатного пуска при последовательном соединении двигателей; три следующие—позиции безреостатного пуска, изменяющие возбуждение тяговых двигателей; затем четыре— позиции реостатного пуска при последовательно-параллельном соединении двигателей; три последние — позиции безреостатного пуска при последовательно-параллельном соединении тяговых двигателей с различными коэффициентами их возбуждения.
В силовом контроллере имеются 12 силовых кулачковых контакторов, из которых контакторы /—10 обеспечивают реостатный пуск, а контакторы //, 12 регулируют возбуждение. Разгон поезда до каждой позиции определяется соответствующим положением рукоятки контроллера машиниста, который имеет одну маневровую и четыре ходовые ступени регулирования скорости.
На пусковой диаграмме (рис. 170) выделены кривые автоматического пуска с нормальным и пониженным ускорением, а также автоматические характеристики маневровой M и четырех ходовых ступеней регулирования скорости
Для изменения направления хода поезда применен реверсивный переключатель с групповым пневматическим приводом. Восемь кулачковых контакторов Bl—В8 (см. рис. 169) осуществляют прямое или обратное включение двух групп обмоток возбуждения тяговых двигателей.
Маневровое положение. При движении электропоезда с минимальной скоростью рукоятка контроллера машиниста должна быть установлена в маневровое положение. При этом включены линейные контакторы ЛК1-2 (см. рис. 169) и мостовой контактор М, вал РК остается на 1-й позиции и его контакторы 7, 8, 11, 12 замкнуты. Контакторы 11 и 12, замкнутые на 1-й позиции, в работе не участвуют и включены только для того, чтобы при повороте вала РК с 18-й позиции на 1-ю не выключались одновременно четыре кулачковых контактора.
В результате собирается цепь из четырех последовательно включенных тяговых двигателей; пусковые резисторы полностью введены и возбуждение двигателей полное.
Цепь питания тяговых двигателей следующая: токоприемник Т, индуктивный фильтр ФД, главный разъединитель ГР, первый виток дифференциального реле ДР, быстродействующий выключатель БВ, линейный контактор ЛК1-2, катуїпка реле перегрузки РП1, обмотки якорей 1-го и 2-го тяговых двигателей, контактор реверсора В1 (при положении «Вперед»), обмотки возбуждения двигателей кі-ккі и кк2-к2, контактор реверсора ВЗ, контактор реостатного контроллера 7, пусковые резисторы Р1—Р5, мостовой контактор М, пусковые резисторы Р10—Рб, контактор реостатного контроллера 8, обмотки якорей 3-го и 4-го двигателей, контактор реверсора В7, обмотка реле ускорения РУ, шунт амперметра ША, второй виток дифференциального реле ДР, токовая обмотка счетчика электроэнергии Сч и заземляющее устройство ЗУ.
Первое ходовое положение. При этом положении рукоятки контроллера машиниста осуществляется автоматический пуск поезда под контролем реле
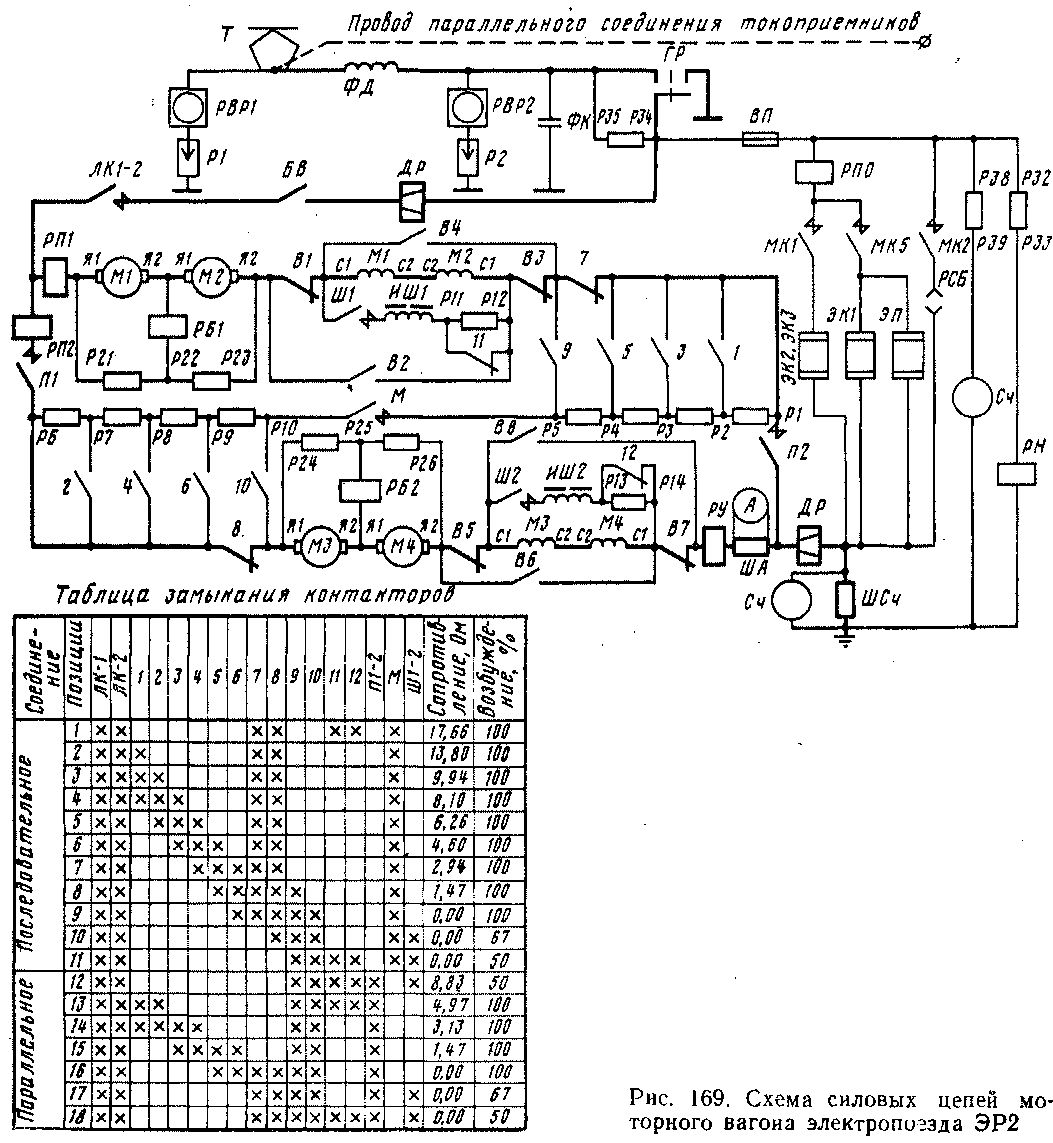
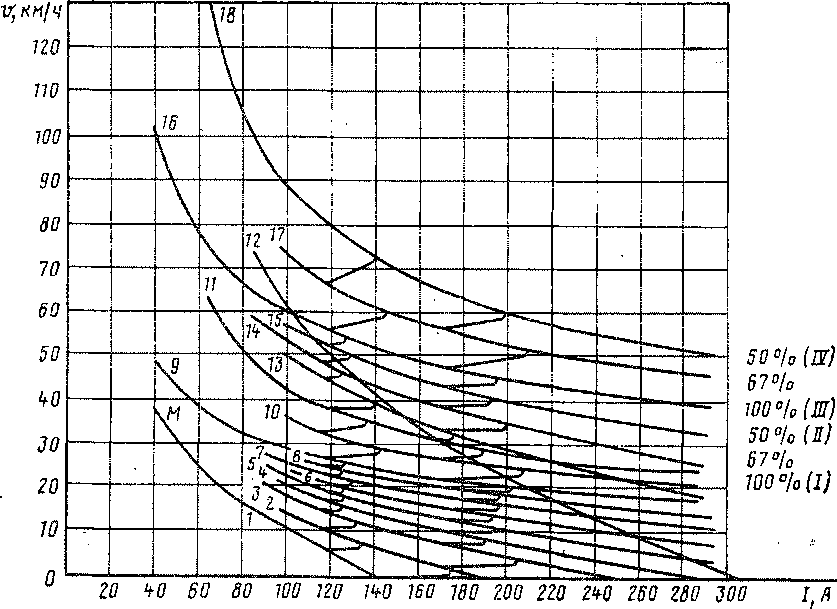
Рис. !70. Пусковая диаграмма электропоезда ЭР2:
I—18 — номера позиций; /—/V — положения главной рукоятки контроллера машиниста
ускорения до выхода на автоматическую характеристику последовательного соединения при полном возбуждении (вал РК доходит до 9-й позиции). Вал РК, переходя с позиции на позицию, последовательно замыкает контакторы /—10 и выводит пусковые резисторы. Момент перехода с одной позиции на другую контролирует РУ, которое дает возможность валу реостатного контроллера повернуться только тогда, когда ток тяговых двигателей снизится до 175 А.
Для обеспечения плавности разгона поезда сопротивления пусковых резисторов подобраны так, чтобы броски тока при переходе с позиции на позицию были не больше 205 А. Лишь на 3-й позиции ток может достичь 220 А, однако если машинист задержит рукоятку контроллера в маневровом положении на 2—3 с, то и на этой позиции ток не превысит 205 А.
На 9-й позиции РК тяговые двигатели соединены последовательно, пусковые резисторы полностью выведены и возбуждение двигателей полное. Эта ступень регулирования является первой ходовой.
Второе ходовое положение. При этом положении рукоятки контроллера машиниста вал РК переходит на 10-ю позицию. На этой позиции включаются контакторы 1111—Ш2, которые замыкают цепи шунтирования, ослабляющие возбуждение двигателей на 33 %.
На 11-й позиции кулачковые контакторы 11 и 12 закорачивают резисторы в цепях шунтирования, в результате чего возбуждение тяговых двигателей ослабляется на 50%. Эта ступень регулирования является второй ходовой.
Третье ходовое положение. При этом положении рукоятки контроллера машиниста вал РК поворачивается с 11-й на 12-ю позицию. Осуществляется переключение групп тяговых двигателей на последовательно-параллельное соединение. Переключение происходит по методу «моста», при этом соблюдается такая последовательность: включаются контакторы 171, 172, подключающие параллельно каждой паре двигателей резисторы сопротивлением по 8,83 Ом. Если напряжение контактной сети равно номинальному, то ток, протекающий через резисторы, примерно равен току тяговых двигателей, т. е. мостовой контактор M обесточен. Отключается индивидуальный мостовой контактор М, в резуль-
тате чего группы двигателей оказываются включенными параллельно, причем в каждой группе полностью введены пусковые резисторы.
В связи с тем что на 12-й позиции контакторы 1111, 1112 остаются включенными, то переход на последовательно-параллельное соединение происходит при ослабленном возбуждении двигателей.
Ток тяговых двигателей при переходе вала РК на 12-ю позицию не увеличивается, в результате чего реле ускорения ее не фиксирует, а сразу осуществляется переход на 13-ю позицию. На этой позиции почти одновременно включаются кулачковые контакторы / и 2, выводя часть пусковых резисторов, и выключаются контакторы Ш1, Ш2, возобновляя режим полного возбуждения тяговых двигателей. На этом заканчивается переход на последовательно-параллельное соединение тяговых двигателей. Далее происходит вращение вала РК до 16-й позиции под контролем РУ. Резисторы выводятся попарно в каждой группе двигателей. На 16-й позиции все резисторы выведены, тяговые двигатели соединены в две параллельные группы и имеют полное возбуждение. Эта ступень регулирования является третьей ходовой.
Четвертое ходовое положение. При этом положении рукоятки контроллера машиниста вал РК поворачивается на 17-ю позицию. Замыкаются контакторы Ш1,Ш2, т. е. осуществляется первая ступень ослабления возбуждения (33 %). Затем вал переходит на 18-ю позицию, где осуществляется вторая ступень ослабления возбуждения двигателей (50 %). На 18-й позиции можно достичь наибольшей скорости движения электропоезда.
При необходимости машинист может производить обратный переход с четвертого ходового режима на третий, так же как и со второго ходового режима на первый. При этом происходит отключение контакторов 1111, Ш2 и тяговые двигатели переходят в режим полного возбуждения, но вал РК остается на прежней позиции. Если же машинист опять переведет рукоятку контроллера из третьего в четвертое положение или из первого во второе, то возбуждение двигателей сразу уменьшится на 50 %. Такой переход при низких скоростях может вызвать бросок тока в двигателях сверх допустимого.
При автоматическом пуске тяговых двигателей, если машинист возвратит рукоятку контроллера из первого положения в маневровое в момент, когда пуск еще не закончился, вал РК останется на той позиции, до которой он успел дойти. При этом дальнейшее движение электропоезда будет осуществляться при включенных пусковых резисторах.
Если рукоятка передвинута в нулевое положение, выключаются линейные контакторы Л К1-2, а также контактор М или контакторы П1, П2 в зависимости от того, какие из них были до этого включены. Цепь силового тока разрывается. После этого вал РК автоматически начинает вращаться до 1-й позипии и останавливается на ней, подготавливая цепь для следующего включения тока.
Повторное включение тока при движении поезда всегда происходит при последовательном соединении тяговых двигателей со всеми включенными пусковыми резисторами, после чего вал РК доходит до позиции, заданной контроллером машиниста.
Вращение вала РК с 1-й позиции до 18-й продолжается 6—7 с.
⇐Электрическое торможение | Электропоезда ЭР2 и ЭР2Р | Схема вспомогательных цепей напряжением выше 1000 В⇒