Тяговые и тормозные характеристики высокоскоростного электропоезда разработаны с учетом результатов комплексного исследования по установлению главных параметров высокоскоростной магистрали: максимальной и средней (маршрутной) скоростей, допустимых скоростей движения в кривых и расстояний между пунктами, где скорость отличается от максимальной, а также расстояний между промежуточными остановками.
Исследованием, выполненным во ВНИИЖТе, было установлено, что на сети реконструируемых линий Советского Союза, где в перспективе можно ожидать применения высокоскоростного движения моторвагонных электропоездов с максимальной скоростью 200 км/ч, целесообразный уровень ограничения скорости в кривых участках пути составляет около 140 км/ч.
Параметры разгона и электрического торможения, характеризующие режим движения высокоскоростного электропоезда. Расчету тяговых параметров высокоскоростного электропоезда предшествует обычно анализ наиболее целесообразного режима движения при заданных граничных условиях по допускаемой скорости и с учетом известных требований по нагреванию тяговых двигателей, а иногда и по нагреванию элементов силового электрооборудования (например, тпристорного регулятора). Задача отыскания оптимального режима движения решается в простейшей форме с допущением, что сопротивление движению электропоезда в рассматриваемом интервале скоростей постоянно. При движении электропоезда между конечными пунктами маршрута с промежуточными ограничениями скорости и0, когда за общее время хода Т на расчетном перегоне скорость сначала возрастает от v0 до vmax и далее после некоторого времени движения с равновесной тягой снова снижается до v0% в оптимальном режиме [41 средняя "скорость на участках разгона

Из выражения (1) следует, что при игаах = 200 км/ч и v0=l40 км/ч скорость ир = 172 км/ч. Так как в указанном режиме 'средние скорости на участках разгона' ир [ и] торможения" vT равны, а
время разгона составляет 30% общего времени хода, т. е. Тр = 0,37', и соответственно время торможения от t»max до v0 равно 7*т == 0,37", го средняя скорость на расчетном перегоне
tcP = °.3c;p + 0'4t''nax + 0,3i;T (2)
или
рср = 2-0,3-172 + 0,4-200 = 183 км/ч.
Общее время хода на расчетном перегоне длиной 20 км (без учета времени следования с ограниченной скоростью v0 на участке длиной 1 км)
Г = 19-3600/183 = 374 с.
Время, затрачиваемое на разгон и торможение,
7Р = Гт = 112 с. Отсюда среднее ускорение при разгоне от 140 до 200 км/ч яСр = (»щ«х — voVtp = (200 - 140)/3,6-112 = 0,149 м/с2.
Протяженность участка следования с равновесной тягой при установившейся максимальной скорости
Ly ■= 0,4Г1»тах = 0,4-374-200/3600 = 8,3 км,
что равно 41,5°о длины расчетного перегона.
Если упростить решение задачи и принять на основании общих соображений наиболее распространенное для высокоскоростных линий условие движения с наибольшей скоростью на пути, равном 50% протяженности расчетного участка, т. е. в нашем примере на пути длиной 10 км, то длины участков разгона и торможения будут равны /_р = /_т = 5 км и среднее ускорение составит
асР = fex — wo)/(2Ip) = 0,157 м/с2.
Полученные таким образом в качестве первого приближения результаты по времени хода и средней скорости на 2—2,5% отличаются от значений, которые можно было бы определить точным способом по правилам тяговых расчетов (при реализации в период разгона значении постоянной «избыточной» мощности). В последнем случае среднее ускорение составило бы около 0,2 м/с2.
Мощность электропоезда. В выполненном выше анализе предполагалось, что для реализации полученных тяговых параметров тяговые двигатели высокоскоростного электропоезда обладают необходимой мощностью, которая определяется как эффективная
^ФФ?=V 2я'2'UtT (3) где Piy ti — соответственно мощность и время движения в фазах: разгона от v0 до итах, следования с итах, электриче-ского торможения от итах до rj0, следования с tv, 1 — оощее время движения на перегоне.
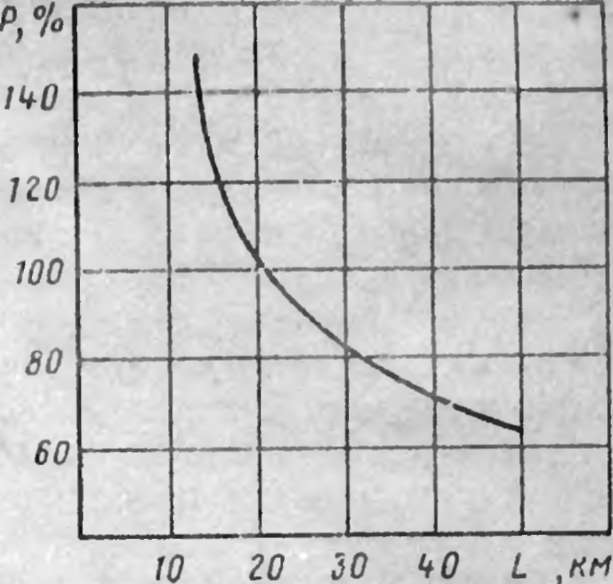
Рис. 5. Зависимость уделыюй продолжительной мощности от длины расчетного перегона
Мощность, необходимая для реализации каждой фазы движения, будет, естественно, тем больше, чем тяжелее поезд. Ввиду того, что масса электропоезда уточняется на стадии технического проекта (она зависит от массы тары вагонов и их числа в составе, а также от расчетной населенности вагонов), в предварительных расчетах эффективную мощность тяговых двигателей выражают обычно удельной величиной, относя к массе брутто электропоезда (кВт/т).
Для указанных выше параметров расчетного перегона минимум удельной эффективной
(продолжительной) мощности тяговых двигателей составляет 8,35 кВт/т и достигается в режиме движения с равными значениями ускорения и замедления](примерно 0,15 м/с2). В этом случае мощность, реализуемая в фазе разгона, больше, чем в фазе электрического торможения, что обусловлено действием сопротивления движению (последнее препятствует ускорению, но способствует замедлению).
Заметим, что оптимальное решение но условию минимизации эффективной мощности не совпадает с оптимумом по расходу электроэнергии. Для скоростного электропоезда режим движения с наименьшим расходом энергии характеризуется, как и для пригородных электропоездов, наибольшим реализуемым средним ускорением.
Изменение параметров расчетного перегона (по его длине и по значению ограничения скорости при той же максимальной скорости) оказывает соответствующее влияние на эффективную мощность и реализуемую маршрутную скорость.
Из рис. 5 видно, как меняется удельная продолжительная мощность при изменении длины расчетного перегона и условии, что ишах = 200 км/ч и v0 = 140 км/ч. За 10096 приняты значения мощности, относящиеся к расчетной длине перегона 20 км. Например, уменьшение расчетной длины перегона на 25% (с 20 до 15 км) приводит к увеличению удельной продолжительной мощности на 21%. Если же увеличить расчетную длину перегона на 25% (с 20 до 25 км), то удельная продолжительная мощность снижается на 10%. В обоих рассмотренных случаях маршрутная скорость изменяется весьма незначительно (на 0,5—1,0%).
Не следует думать, что, если не уменьшая мощности электропоезда, увеличить расчетную длину перегона, то благодаря избыточной мощности получим существенный прирост маршрутной скорости. Практически большого прироста маршрутной скорости не будет из-за того, что максимальная скорость остается на заданном уровне 200 км/ч. Расчеты показывают, что даже при увеличении в 2 раза расчетной длины перегона (с 20 до 40 км) при сохранении прежней мощности электропоезда маршрутная скорость увеличится всего на 2,596. В случае же, когда длина перегона уменьшается, а расчетная мощность электропоезда при этом сохраняется прежней (не увеличивается), маршрутная скорость снижается существенно, так как режим движения электропоезда выбирают с учетом нагревания тяговых двигателей. Очевидно также, что уменьшение расчетного значения ограничения скорости потребует соответствующего увеличения удельной продолжительной мощности тяговых двигателей.
Тяговые характеристики электропоезда ЭР200, удельная продолжительная мощность которого равна 11,9 кВт/т, фактически обеспечивают выполнение требуемых эксплуатационных показателей на линии с равнинным профилем при расчетных скоростях движения 200—140 км/ч и длине расчетного перегона не менее 15 км.
Выполняя расчет мощности электропоезда, учитывают обычно вероятность отклонения в эксплуатации граничных условий (по значению ограничения скорости и расстоянию между пунктами указанных ограничений) от расчетных. Поэтому для современных электропоездов с конструкционной скоростью 200—210 км/ч характеристики удельной эффективной мощности, реализуемые на условном расчетном перегоне, и фактические значения установленной удельной продолжительной мощности двигателей находятся в соотношении, равном примерно 1,3—1,4.
До сих пор речь шла о требуемом значении удельной продолжительной мощности электропоезда, необходимом для обеспечения оптимального режима движения на перегоне при заданных граничных условиях. Что же касается мощности, которую необходимо иметь ПРИ утах» Т0 она зависит от ряда технических характеристик линии и подвижного состава, а также от ускорения, которое требуется иметь, когда скорость поезда достигает утах (так называемое «остаточное» ускорение). Мощность на валу тягового двигателя при максимальной скорости, кВт
р = ПГо+1020аоСт<3 (1 + 7)1 атах (А) 3670Чиерт ' 1 '
где №0 — полное сопротивление движению поезда на площадке при максимальной скорости, Н; я0ст — «остаточное» ускорение при максимальной скорости, м/с2; 0. — масса поезда, т;
у ~ коэффициент инерции вращающихся масс поезда; ЛпеР — к- п- Д- передачи двигателя;
т — число двигателей. «Остаточное» ускорение на горизонтальном участке пути принимают обычно для высокоскоростного электропоезда не менее 24
0,05 м/с2, что примерно соответствует обеспечению максимальной скорости при равновесной тяге на подъемах около 5°/00.
Сопротивление движению высокоскоростного электропоезда. как правило, меньше, чем оно могло бы быть у обычного пригородного электропоезда в диапазоне скоростей 100—200 км/ч, благодаря хорошей обтекаемости головного и хвостового вагонов, отсутствию выступающих частей на боковых стенках всех вагонов и перекрытию промежутков между вагонами с боков и сверху гибкими обтекателями.
Основное удельное сопротивление движению (Н/т) 14-вагонного электропоезда определяют с достаточной для предварительных расчетов точностью по следующим формулам соответственно для движения под током и без тока:
ш'0 = 13 + 0,1» + 0,00164и2; (5)
^=15,4+0,21^ + 0,00164^. (6)
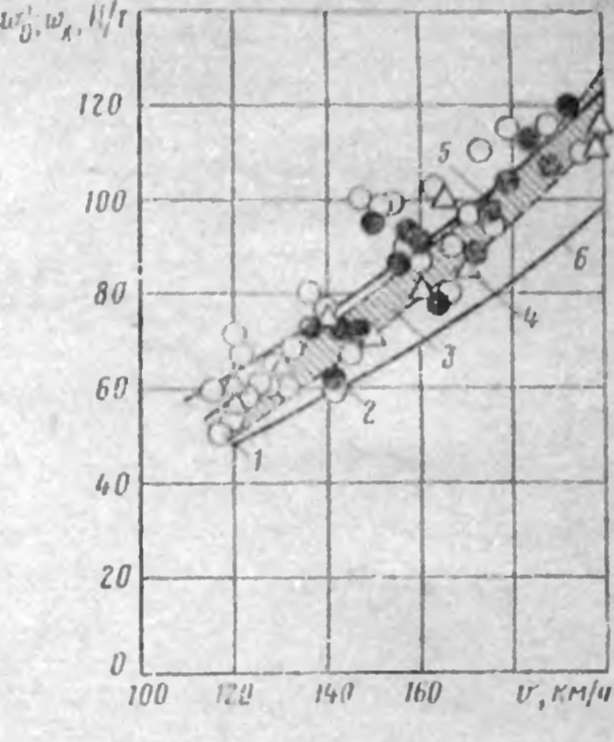
Рис. 6. Зависимости удельного сопротивления движению от скорости:
/ — порожний вчсьмивагонный электропоезд ЭР200. участок Б.чбино—Чудово. встречный ветер 8 м/с иод углом 30°. температура воздуха + Ю1 С: 2 — то же, бесстыковой путь участка Бабино—Любань. ветер слабый, температура воздуха -И С С; 2 — зона опытных значений для шестивагонного электропоезда ЭР200. бесстыковой путь участка Ханская - Белореченская, ветер слабый, температура воздуха +2~>* С; 4 — японский 12 вагонный электропоезд «Хнкари». 5 — но формуле (С); б — по формуле (5)
Указанные формулы рекомендуют [5, 61 для высокоскоростного электропоезда с вагонами длиной 26 м, миделем 10—11 м2 и массой, приходящейся на ось до 17 т. Кривые, построенные по этим формулам, хорошо согласуются с приведенными на рис. 6 опытными данными1.
Тяговые расчеты, выполненные с учетом сопротивления движению для электропоездов различной массы брутто с проверкой двигателей на нагрев (по эффективному току), позволили составить номограмму (рис. 7). Расчеты выполнены в предположении, что эффективный ток тяговых двигателей с учетом электрического торможения при каждом ограничении скорости равен 0,85 часового. Поль1 Из опыта выбега определяли значение Ду/Д/, и основное удельное сопротивление электропоезда при езде без тока подсчитывали по формуле wx =»
= 1020 (I + у) -дт* — 10/ (здесь / — уклон, %о); коэффициент вращающихся
масс у определяли исходя из расчетных значений эквивалентной массы вращающихся* частей головного (2,41 т) и моторного (3,87 т) вагонов. Для порожнего поезда 2Г + 2 (МТ + А\) массой 326,0 т у = 20,3/326 = 0,063; 2Г+ЗХ Х(МТ+М) массой 440,5 ту= 28.04/440,5 = 0.004; 2Г + 6 (МТ + М) массой 784,0 т у = 5126/784 = 0,066.
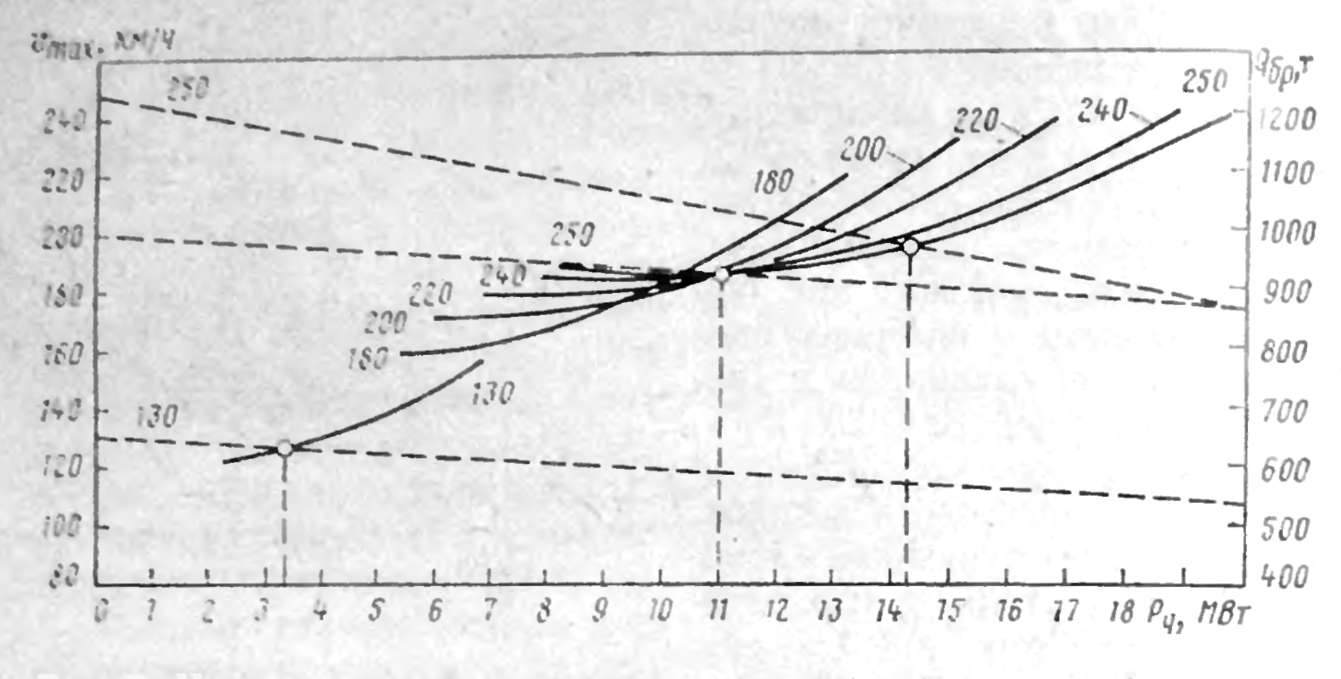
Рис. 7. Номограмма для предварительного определения часовой мощности электропоезда по массе брутто и максимальной скорости
зуясь номограммой, можно предварительно оценить мощность электропоезда, если известны максимальная скорость движения и масса поезда брутто. Для этого достаточно соединить прямой линией, как это показано на рис. 7, численное значение максимальной скорости на оси г'шах со значением массы поезда на оси Q6P. Требуемая мощность находится в точке пересечения указанной прямой с кривой мощности, относящейся к данной максимальной скорости. На рис. 7 в качестве примера определены мощности скоростных электропоездов для максимальных скоростей 200 и 250 км/ч и пригородного электропоезда с максимальной скоростью 130 км/ч.
При построении номограммы принято условие, что поезда с различными максимальными скоростями рационально эксплуатировать на линиях с соответствующими этим скоростям расстояниями между пунктами ограничения скорости и соответственно различными значениями этих ограничений. Для электропоезда с максимальной скоростью 180—220 км/ч ограничение скорости принято 140 км/ч, а среднее расстояние между пунктами ограничения 15—20 км; для электропоезда с максимальной скоростью 240—250 км/ч ограничение скорости принято 1G0 км/ч, а среднее расстояние между пунктами ограничения 25—30 км. Кривая, относящаяся к электропоездам с 1'гоах = 130 км/ч, построена с учетом условий пригородного движения с частыми остановками, в среднем через каждые 3 км.
Для электропоезда с vmax - 200 км/ч и массой брутто 869 т (показатели электропоезда ЭР200) часовая мощность определена по номограмме значением 11 МВт. Отметим, что у первого опытного электропоезда ЭР200 часовая мощность составляет 10,3 МВт по расчету тяговых двигателей и 11,5 МВт по их испытаниям.
Скоростная характеристика тягового двигателя." Наряду с мощностью тягоЕые двигатели характеризуются диапазоном скоростей, в котором осуществляются регулирование напряжения на 26
коллекторе и регулирование возбуждения, иными словами, — параметрами, которые определяют «высоту» скоростной характеристики.
Анализ характеристик тяговых двигателей показывает, что для сохранения значительной силы тяги при высоких скоростях движения, т. е. для получен и ;г фебусмого ускорения в конце разгона целесообразно выполнять -пи-оные двигатели с «высоколежащими» характеристиками и осуществлять регулирование возбуждения в довольно узком диапазоне. Если это требование выполнить, то ток и магнитный поток тяговых двигателей будут при достижении максимальной скорости близкими к их значениям при часовом режиме. Из изложенного следует, что для тяговог© двигателя высокоскоростного электропоезда целесообразно иметь возможно меньшее значение коэффициента регулирования скорости
ко = ".пах^'ч. (7)
гдентах—максимальная частота вращения якоря, об/мин;
Пц— часовая частота вращения при полном возбуждении, об/мин.
Двигатель с меньшим значением к0 обеспечивает при высоких скоростях большее ускорение поезда, чем двигатель той же мощности, но с большим значением к0. К тому же у пего будут лучшие массо-габаритные показатели и более благоприятные потенциальные условия на коллекторе. Последнее вытекает из следующего. Подставим в известное выражение мощности тягового двигателя
Р = 0,1645£а2/ааВ0Л5/ц10-15 (8) значение пч из формулы (7). Получим
P = 0,164D^aaBбЛ5-^^-10-,5. (9)
Предполагается, что при конструировании двигателей для скоростного электропоезда определены значения мощности Р (кВт), диаметра якоря £а (см), коэффициента магнитного перекрытия а. Кроме того, исчерпаны такие возможности, как увеличение линейной нагрузки АЗ (А/см), магнитной индукции в воздушном зазоре В0 (Тл) и частоты вращения/;тах. Отсюда видно, что при выбранных значениях Р, Оа, а, £0> А£ и нгаах, уменьшая к„, можно одновременно уменьшить эф<фективную длину якоря /а (см). При этом увеличивается номинальная частота вращения якоря яч, но снижается номинальный вращающий момент двигателя.
Таким образом, двигатель одной и той же мощности с меньшим значением к0 будет иметь в зоне низких частот вращения меньший вращающий момент, а в зоне высоких — больший, чем двигатель с большим значением к0. Кроме того, с уменьшением расчетного значения /ср снижается масса двигателя благодаря уменьшению /а. Одновременно улучшаются потенциальные условия на коллекторе двигателя ввиду сокращения диапазона ослабления возбуждения. Наряду с получением требуемых тяговых показателей уменьшение
коэффициента к0 способствует повышению эффективности электрическою торможения, так как в зоне высоких скоростей двигатель с меньшим Л"р способен развивать больший тормозной момент, чем двигатель с большим Однако при этом снижается тормозное усилие в зоне низких скоростей, что, впрочем, не имеет существенного значения, так как основная доля кинетической энергии переходит в электрическую именно в зоне высоких скоростей.
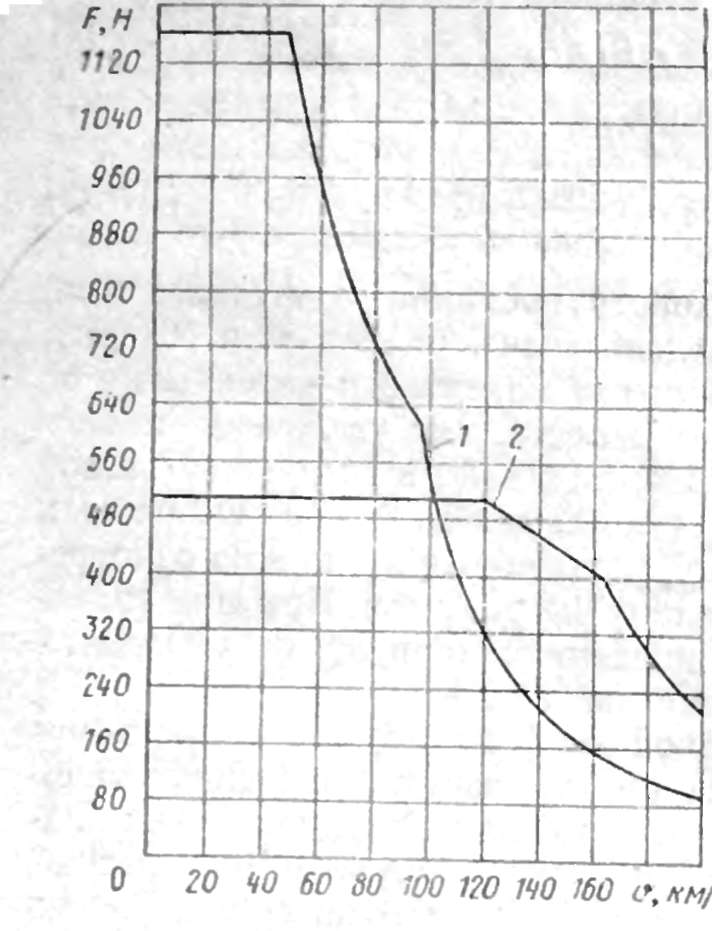
Из изложенного «следует, что специальные требования, которые предъявляют к параметрам тяговых двигателей условия высокоскоростного движения, в значительной степени удовлетворяются выбором возможно меньшего значения к0. Проследим это на примере тягового двигателя с часовой мощностью 240 кВт для пригородного электропоезда с итах — 130 км/ч. Он имеет массу 2200 кг ик,. = 3,73. Уменьшим коэффициент регулирования скорости этого тягового двигателя в 2,5 раза до киа — 1,48, во столько же раз уменьшив эффективную длину его якоря. Тяговые характеристики 14-вагонного электропоезда для обоих вариантов тяговых двигателей поясняются рис. 8.
Тяговые расче!ы показывают, что разгон 14-вагонного поезда с характеристикой 2 до скоростей менее 140 км/ч выполняется медленнее, а до скоростей, превышающих 140 км/ч, быстрее, чем у поезда с характеристикой /. На пути около б км электропоезд с характеристикой 2 достигает скорости 200 км/ч, имея остаточное ускорение 0,05 м/с2, а электропоезд с характеристикой 1 па том же пути развивает скорость лишь 160 км/ч. (Отметим, что сопротивление движению для обоих вариантов принято соответствующим высокоскоростному электропоезду.)
Уменьшение длины якоря у двигателя с /сс,, приводит к тому, что несмотря на увеличение примерно в 2 раза реализуемой мощности при максимальной скорости, реактивная э. д. с. возрастает лишь на 0,3 В. Расчеты потерь и к. п. д. показывают, что для двигателя с /сг, режим работы с максимальной скоростью явно неэкономичен, так как Рис. 8. Тяговые характеристики элект- в этом режиме к. п. д. дви-ропоезда при л-1<л =3,73 (/) н = гателя снижается на 6—7% = М8 (2) но сравнению с часовым ре-
жимом. В то же время для двигателя с /с1>4 работа в режиме максимальной скорости соответствует зоне наибольших значений к. п. д. К тому же к. и. д. двигателя с меньшим к0 примерно на 2% выше ввиду уменьшения длины меди обмоток и снижения в связи с этим электрических потерь примерно на 40%.
Оценка возможного снижения массы двигателя при уменьшении длины якоря в 2,5 раза показала, что можно рассчитывать на облегчение двигателя примерно на 800 кг, а тары моторного вагона на 3,2 т.
В нашем примере уменьшение ку с 3,73 до 1,48 привело при пуске к повышению скорости выхода на безреостатную позицию с 53 до 118 км/ч, что значительно повысило потери энергии в пусковых реостатах.
Однако указанные потери снижаются примерно в 2 раза благодаря группировке тяговых двигателей с использованием вось-мимоторной силовой цепи путем объединения силовых цепей двух моторных вагонов.
Таким образом, для удовлетворения основных требований к тяговым двигателям скоростного электропоезда, а именно: сохранения значительной силы тяги и тормозной силы (при электрическом торможении) в зоне высоких скоростей, а также уменьшения массы двигателей и их размеров коэффициент регулирования скорости рекомендуется выбирать возможно меньшим, выполняя сравнение вариантов характеристик двигателей по условиям разгона после прохода участков пути, требующих ограничения скорости.
Тяговые двигатели первого электропоезда ЭР200 спроектированы с расчетом, чтобы их параметры соответствовали более низкому по сравнению с расчетным уровню ограничений скорости движения в период испытаний и ор1апнзации высокоскоростного движения на линии.
Они имеют кг, — 1,83, что на 20—25% выше рекомендуемого значения для расчетных условии, характеризующихся vmax = 200 км/ч и 1'0= 140 км/ч. Однако сила тяги сохраняется на достаточно высоком уровне практически до максимальной скорости, благодаря глубокому ослаблению возбуждения тяговых двигателей до 19-20%.
⇐Схема формирования электропоезда, планировка вагонов и расположение оборудования | Электропоезд ЭР200 | Тяговые и тормозные характеристики⇒