Контроллер машиниста 1КУ.017 (рис. 45) предназначен для дистанционного управления электропоездом из кабины машиниста. Основные технические данные контроллера машиниста следующие:
Поминальное напряжение . . НОВ
Число фиксированных позиций:
главного вала........... Ю
реверсивного вала ..... 3
Тип кулачковых контакторов......* КЭ-42
Число кулачковых контакторов на валах:
главном......... 13
реверсивном . ..... 5
Раствор контактов контакторов ...... 6—12 мм
А\асса . . … .... 35 кг
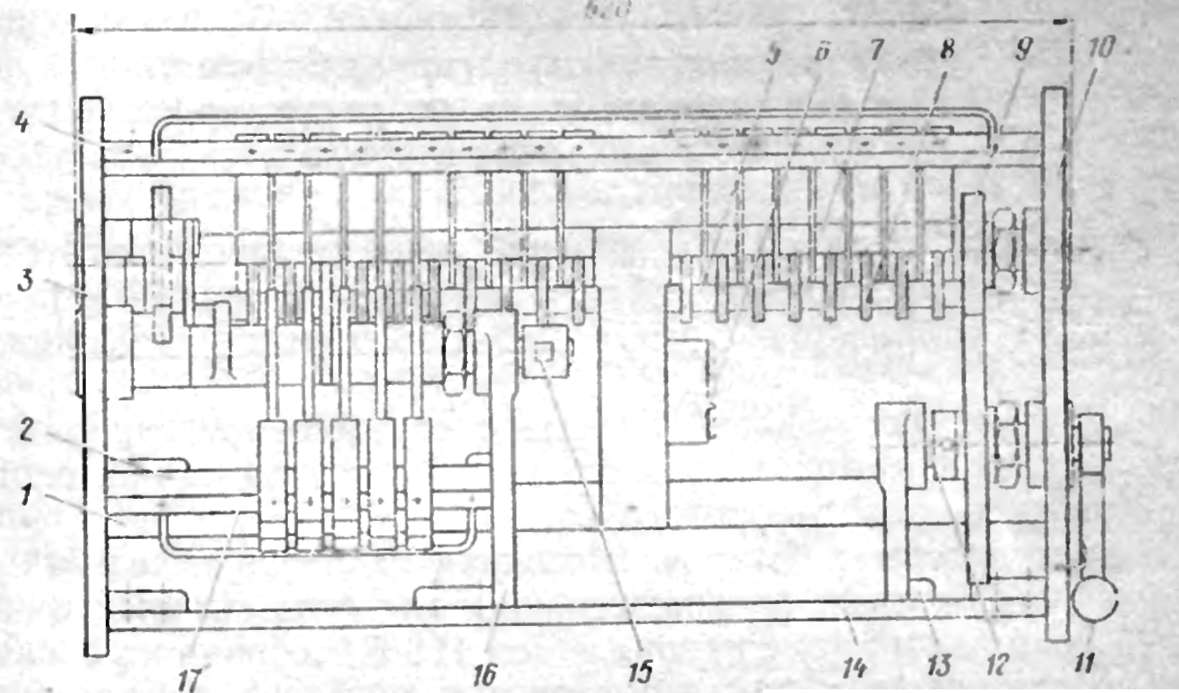
Рис. 45. Контроллер машиниста:
I, 2. 4 5 14— планки; 3, 10 — рамы каркаса; 6 — штепсельный разъем; 7 — кулачковые контакторы- в —главный кулачковый вал; 9 — зубчатая передача; // — рукоятка главного вала- ІІ — подшипник вала главной рукоятки: 13. 16 — кронштейны; /5 ~- реверсивная рукоятка; /7 — реверсивный вал
|
Обозначение |
|||
|
Наименование |
но схемам |
11шаметп |
Значение |
|
И тип реле |
(см. рнс. |
парамеїра |
|
|
55. 57-59) |
|||
|
1 Перегрузки тяговых дви- |
РГП, РП2 |
Тик \ ставки, А |
510±25 |
|
гателей Р-103 20 |
|||
|
Перегрузки преобразова- |
РИП |
То же |
190±10 |
|
теля "Р-103.21 |
|||
|
Перегрузки отопления |
РПО |
27±2 |
|
|
Р-103.10 |
|||
|
Дифференциальное |
РД1, РД2 |
Разность токов в сило- |
75±15 |
|
Р-104*1-3 |
вых проводах, А (при |
||
|
питании катушки под- |
|||
|
магничпвання напря- |
|||
|
жением 110±5 В) |
|||
|
Воксовання и юза Р-304Г |
РБ1—РБ4 |
Ток срабатывания, мА |
40±1 |
|
Ток отпадания не менее, \| \ |
6 |
||
|
Напряжения сети |
РНС |
МЛ Ток срабатывания, мА |
37±2 |
|
Р-3100.14 |
Ток отпадания не менее, «с А |
13 |
|
|
Заземления тормозных |
РЗТ1, РЗТ2 |
МЛ Ток уставки, мА |
20±1 |
|
, контуров Р-3100.3 |
|||
|
Контроля магнитно-рель- |
РКМ |
Ток срабатывания, А |
5,5±0,5 |
|
сового тормоза |
|||
|
Р-307А-2 |
|||
|
Промежуточное контак- |
РКБ |
Напряжение срабатыва- |
50±1 |
|
тора батареи РЭВ-311 |
ния, В |
||
|
Напряжение отпадания, и |
48±1 |
||
|
Напряжения генератора |
РНГ |
о Напряжение срабатыва- |
80±5 |
|
Р-306 16 |
ния, В (фазное 50 Гц) |
||
|
Наибольшего напряже- |
РЛШ |
Напряжение срабатыва- |
185±5 |
|
ния генератора |
ния, В (переменного |
||
|
Р-3100.2 |
тока частотой 50 Гц) |
||
|
Повышения напряжения |
РПН У нас в компании Вы можете купить аттестат со скидкой, гарантией и доставкой на дом. |
Напряжение срабатыва- |
62±1 |
|
генератора РЭВ-311 |
ния, В |
||
|
Напряжение отпадания, г» |
60±1 |
||
|
Аварийного выключения |
РАВІ.РАВ2 |
13 Время срабатывания, с |
2,5±0,2 |
|
торможения РЭВ-813 |
|||
|
Времени запуска блока |
РЗБ |
То же |
1,0±0,2 |
|
РЭВ-816 |
|||
|
Времени вентиляторов |
РВВ |
5,0±0,2 |
|
|
РЭВ-818 |
|||
|
Времени торможения |
РВТ1 |
2,5±0,2 |
|
|
РЭВ-813 |
|||
|
То же РЭВ-818 |
РВТ2 |
» |
2,5±0,2 |
|
Времени хода РЭВ-811 |
РВХ2 |
» |
0.5±0,1 —— |
|
Времени хода РЭВ-812 |
РВХ1 |
1.0±0,2 |
|
|
Времени преобразова- |
РВП |
Выдержка времени на от- |
3,2±0,3 |
|
теля РЭВ-818 |
падание при снятии на- |
||
|
пряжения ПО В, с |
Реверсивным вал контроллера машиниста приводится во вращение съемной реверсивной рукоятки 2 (рис. 46) из нулевого положения в одно из рабочих положений («вперед» или «назад»). Главный кулачковый вал контроллера машиниста с 18 кулачковыми шайбами имеет 10 фиксированных положений: нулевое, маневровое, четыре ходовых и четыре тормозных. Рукоятка 1 передает вращение главному кулачковому валу через зубчатую передачу. Главный н реверсивный валы контроллера машиниста сблокированы обычным образом, т. е. поворот реверсивного вала возможен только при нулевом положении главного вала, а поворот главного вала возможен только при рабочем положении реверсивного вала.
Соединение контроллера машиниста с поездными проводами осуществлено посредством штепсельного разъема 3, состоящего из колодки и вставки, имеющих по 13 контактных штырей и гнезд.
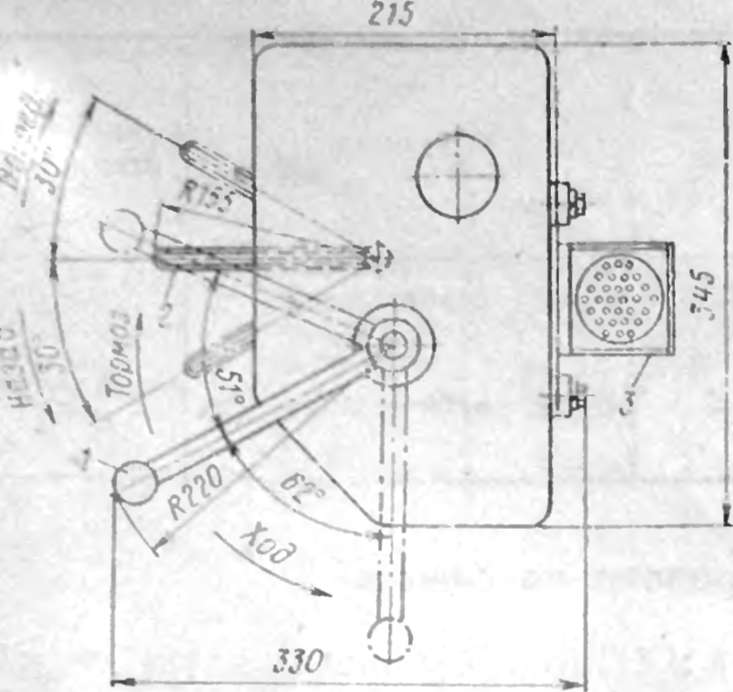
Рис. 46. Расположение рукояток контроллера машиниста
⇐Реле | Электропоезд ЭР200 | Разрядник, аккумуляторная батарея, счетчик киловатт-часов, скоростемер, информационная система⇒