§ 4. Силовая цепь в режиме реостатного торможения
Реостатное торможение основано на способности тяговых двигателей работать в генераторном режиме, при котором выделяемая ими электрическая энергия поглощается в резисторах. Существуют несколько способов осуществления реостатного торможения на электроподвижном составе. Одним из них является реостатное торможение с последовательным возбуждением тяговых двигателей, осуществленное, в частности, на партии электровозов ЧС2Т выпуска 1965 г. (заводской тип 53Е). Однако наряду с определенными преимуществами (отсутствие возбудителя, независимость процесса торможения от наличия напряжения в контактной сети, возможность использования пусковой аппаратуры для переключения тормозных ступеней) такой способ торможения имеет ряд недостатков, влияние которых на эффективность реостатного тормоза, в особенности пассажирских электровозов, весьма существенно (значительная длительность процесса самовоз-
Суждения, трудность автоматизации режимов торможения, большая жесткость тормозных характеристик). В последнее время благодаря применению тиристорного импульсного регулирования появилась возможность создания более совершенных систем реостатного торможения с последовательным возбуждением двигателей (например, на электропоезде ЭР200).
Широкое применение на современном электроподвижном составе получила система реостатного торможения при независимом источнике питания; в ней устранены недостатки, присущие реостатному торможению с классической схемой последовательного возбуждения. При этом наиболее рациональной является система с независимым возбуждением и включением якорей тяговых двигателей яа отдельные резисторы (рис. 7), что позволяет осуществить быстрое нарастание тормозной силы, обеспечивает удобство регулирования и исключает возможность остановки колеса (полного юза) или вращения его в обратную сторону. Два последних фактора —• очень важное преимущество схемы л о сравнению с другими схемами реостатного торможения и в особенности по сравнению с пневматическим торможением.
Рассмотрим процессы возникновения, развития и прекращения юза при реостатном торможении с индивидуальным включением якоря тягового двигателя на тормозной резистор и независимым возбуждением. Термин «юз» не следует отождествлять с заклиниванием колесной пары. Этот предельный режим юза будет оговариваться особо. В общем случае под юзом так же, как и под боксованием, понимаются режимы избыточного скольжения, т. е. вращение одной или нескольких колесных пар с частотой, отличающейся от поступательной скорости локомотива на величину более 2—2,5%.
Особенностью рассматриваемой схемы является пропорциональность изменения тормозной силы на ободе колеса частоте их вращения при постоянном значении тока возбуждения: с уменьшением частоты вращения тормозная сила данной оси снижается и наоборот. Таким образом, тормозная характеристика — зависимость силы тяги от скорости — представляет собой при неизменном токе возбуждения прямую линию, выходящую из начала координат.
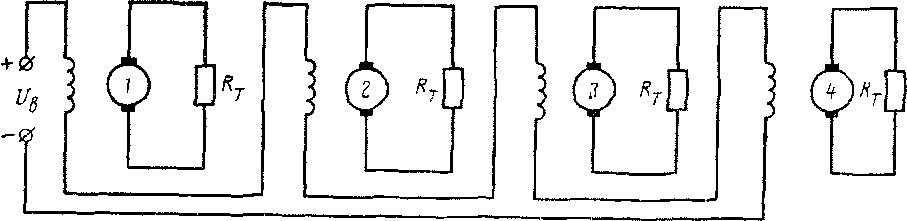
Рис. 7. Схема включения якорей тяговых двигателей на индивидуальные резисторы при независимом возбуждении в режиме реостатного торможения
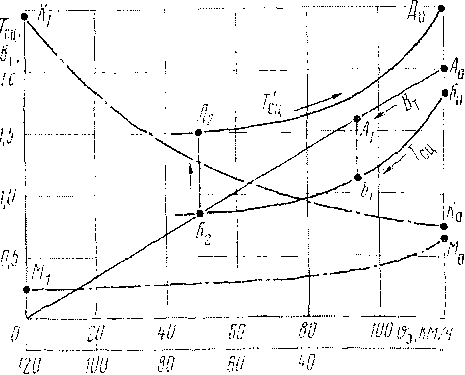
Рис. 8. Кривые, характеризующие изменение сил торможения и сцепления при скольжении (юзе) колесной пары
го %с
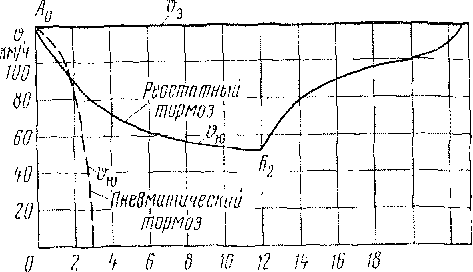
Рис. 9. Кривые, характеризующие изменение скорости колесной пары в процессе развития и прекращения юза
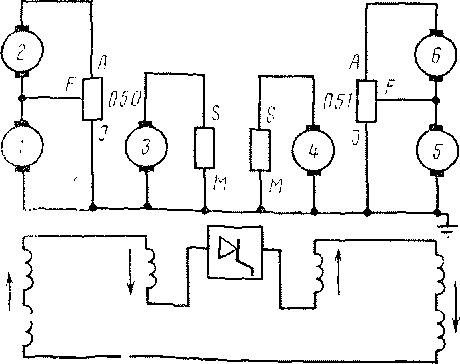
Рис. 10. Схема силовых цепей при реостатном торможении
Допустим, что электровоз работает в режиме реостатного торможения при движении со скоростью 120 км/ч, тормозная сила, реализуемая на ободе колес каждой осп, составляет 2 тс (точка Ао на рис. 8). Если сила сцепления между колесами и рельсами Гсц выше тормозной силы или равна ей, режим торможения протекает устойчиво без возникновения избыточного скольжения. Как только ГСц по какой-либо причине станет меньше тормозной силы Вт, например, снизится до 1,8 тс (точка В0), устойчивость режима нарушается и скорость колесной пары при прежней скорости поступательного движения электровоза начинает падать, т. е. наступает режим юза. Интенсивность протекания этого процесса зависит от разности сил тормозной и сцепления. Тормозная сила на ободе колесной пары при юзе с уменьшением частоты ее вращения изменяется по прямой А0 А\, сила же сцепления после появления избыточного скольжения падает с увеличением скорости скольжения по кривой В0В[В2. Следовательно, процесс юза будет развиваться под действием сил, значение которых определяется ординатами между прямой Л0Л1В2 и кривой БйБ\Б2 (например, А\Б\)- Как видно из рис. 8, разность между Вт и Гсц вначале возрастает, а затем уменьшается; при скорости скольжения примерно 70 км/ч (точка В2) наступает равновесие этих сил. Вследствие этого скольжение дальше
не развивается и процесс стабилизируется — в рассматриваемом случае при поступательной скорости электровоза 120 км/ч колесная пара вращается со скоростью 50 км/ч.
Кривые рис. 9 иллюстрируют развитие юза во времени под действием сил, представленных выше. Скорость достаточно резко уменьшается примерно до 80 км/ч (в течение 3 с). Далее процесс замедляется и плавно переходит в устойчивый юз. Режим скольжения будет продолжаться до тех пор, пока не изменятся внешние условия — сила сцепления или тормозная сила (ток возбуждения). Допустим, что через 12 с после начала юза (точка В2 на рис. 9) под колеса начинают подавать песок, благодаря чему сила сцепления повышается от 0,9 тс (точка В2 на рис. 8) до 1,25 тс (точка Дг). Под действием положительной разности сил сцепления и тормозной начинается увеличение скорости юзую-щей колесной пары, т. е. уменьшение скорости скольжения. Примерно через 23 с от начала подачи песка юз прекращается.
При механическом (пневматическом) торможении сила сцепления в условиях скольжения изменяется по такому же закону, как и при реостатном торможении. Однако тормозная сила не падает, а увеличивается, так как с уменьшением частоты вращения сила трения между колесом и колодкой при неизменном давлении в тормозных цилиндрах растет. Следовательно, разность Вт—Тсц непрерывно возрастает (штрих-пунктирные кривые на рис. 8), процесс юза развивается все более интенсивно и заканчивается заклиниванием колесной пары в случае механического торможения уже через 3 с (см. рис. 9). При реостатном торможении заклинивание физически невозможно.
В тяговом режиме якоря двигателей 3 и 4 (см. рис. 3) включены на отдельные секции MS резисторов 050 и 051, -а якоря групп двигателей 1, 2 и 5, 6 — на секции AI. В последнем случае для обеспечения противогазной устойчивости схемы с последовательным соединением двух якорей на общий резистор средние точки каждой групп двигателей и резисторов соединяют уравнительным проводом. Обмотки возбуждения всех шести двигателей соединены последовательно и питаются от независимого источника — статического тиристорного возбудителя, подключенного, в свою очередь, к части (секция МР) тормозных резисторов двигателей 3 и 4.
Переход из режима тяги в режим реостатного торможения может производиться на любой позиции контроллера, включая ступени ослабления возбуждения. После подачи команды на включение тормоза в схеме силовых цепей осуществляются следующие переключения: размыкаются контакты ослабления воз* буждения (если они включены) и реостатные, а затем вал группового переключателя поворачивается в положение Т, соответствующее тормозному режиму. Контактами этого переключателя обеспечивается подключение якорей тяговых двигателей к соответствующим секциям резисторов и последовательное соединение обмоток возбуждения.
Якоря тяговых двигателей 1 и 2 (рис. 10) подключаются к секции AI резистора 050 контакторами 27 и 35 (см. рис, 3)- Цепь между средней точкой Q2 якорей и выводом F резистора (уравнительное соединение) замыкается контактором 43. Якорь тягового двигателя 3 подключен к секции MS резистора 050 контакторами 23 и 49, а якорь двигателя 4 к секции MS резистора 051 — контакторами 51, 21 и 50. Якоря двигателей 5, 6 подключены к секции AI резистора 051 контакторами 25, 34, 36. Уравнительное соединение замыкается контактором 44. Снижение потенциалов тормозных резисторов 050, 051 до уровня потенциалов земли обеспечивается замыканием контактора 54, который соединяет с землей (провод 197) точку / резистора 050 (провод 013), точку М резистора 050 (провод 013, контактор 23, провод 042) и точку М резистора 051 (провод 042, контакторы 21 и 51, провод 010). Точка / резистора 051 подключена к земляному проводу 197 (провод, соединяющий силовую цепь с землей) постоянно через
1> ::епь якоря каждого тягового двигателя включены транс-: ; :мры постоянного тока 025—030, сигнал от которых, про-:: ; пильный току якоря, поступает в блок автоматики, а также ;: : - реле перегрузки 031—036.
последовательно соединенных обмоток возбуждения тя-. . двигателей замыкается следующим образом: от вывода D , . иного возбудителя 170 через реле перегрузки 181, инди-', , . :.л-шй электропневматический контактор 171, обмотку воз-. :ня 064 двигателя 4, контакты реверсора 071, контакторы - ' . -Ч контакты реверсора 071, обмотки возбуждения двигате-: 6, контактор 53, контакты реверсора 070, обмотки воз-, ::;ія двигателей 2 и /, контактор 52, обмотку возбуждения :ч:ля 3, контакты реверсора 070, контактор 33, шунт 121, !Ю (сигнал с которого, пропорциональный току возбужде-■;"!ступает в блок автоматики), через земляной провод 197 ;;у Е возбудителя 170. ." включение возбудителя 170 к выводам Р тормозных резис-050 и 051 обеспечивается включением соответственно кон-; ..в 172 и 173. Контактор 174 включает возбудитель на пос-
• тсльно соединенные в режиме торможения генераторы уп-. ня и аккумуляторные батареи. Эта цепь предусмотрена • ітания обмоток возбуждения напряжением 100—110 В в
::ый момент торможения. В режиме реостатного торможе-показаииям амперметров 865 (866) контролируют ток в :::сфя и амперметров 863(864) — ток возбуждения.