§ 93. Реостатное торможение
Реостатное торможение с самовозбуждением тяговых двигателей. Построение схем реостатного торможения с самовозбуждением определяется способом соединения двигателей в тяговом режиме, значением напряжения контактной сети, диапазоном скоростей, в котором приме-
няют торможение, требованиями электрической устойчивости и правильного намагничивания двигателей. Реостатное торможение с самовозбуждением тяговых двигателей в основном применяют на э.п.с. постоянного тока.
При двух тяговых двигателях устойчивое реостатное торможение получается при последовательном их соединении (рис. 247, а). Однако схема рис. 247, а практически нецелесообразна, если в тяговом режиме применяют две группировки двигателей: последовательную и параллельную. Если пренебречь падением напряжения в обмотках тяговых двигателей, то при последовательном соединении их пусковое сопротивление гп ж с/с//п. Полагая 1>твх = аС!3 — а£/с и / к, /п, получим тормозное сопротивление гт = 2ас/с// = 2аг„. Здесь а — допустимое отношение напряжения иа двигателях в тормозном режиме к напряжению в тяговом. Для моторных вагонов (метрополитенов и др.), рассчитанных на относительно низкое напряжение сети, часто принимают а ж 2. Тогда при последовательном соединении двух двигателей тормозное сопротивление должно быть примерно в 4 раза больше пускового. Поэтому такие схемы реостатного торможения не нашли применения.
В случае параллельного соединения двух двигателей в тормозном режиме (рис. 247, б) и двух группировок двигателей в тяговом режиме тормозное сопротивление можно увязать с пусковым по отдельным ступеням, так как через общий тормозной резистор проходит ток двух параллельных групп и гт = а(/с/(2/) = = гпа/2. Чтобы схема рис. 247, б удовлетворяла условиям электрической устойчивости, на э.п.с. применяют перекрестное соединение обмоток, обеспечивающее выравнивание токов в параллельных цепях.
При переходе на реостатное торможение реверсируют обмотки возбуждения или обмотки якорей тяговых двигателей, чтобы не размагнитить машины, так как процесс реостатного торможения может начаться только при наличии остаточного магнитного потока двигателей, который индуцирует э.д.с, пропорциональную частоте вращения их якорей. В схеме реостатного торможения, показанной на

Рис. 247 Принципиальные схемы реостатного торможения с самовозбуждением
рис. 247, в, можно не применять реверсирование.
При четырех тяговых двигателях схемы реостатного торможения можно получить, соединив двигатели последовательно (рис. 247, г), последовательно-параллельно (рис. 247, е) и параллельно. Схема рис. 247, г применена на многих моторных вагонах пригородных электропоездов. Последовательное соединение двигателей используют и в тяговом режиме. Для ограничения потенциалов цепи средняя точка с заземлена через реле заземления РЗ.
Схема рис. 247, е применена на вагонах типа Е метрополитенов и подобна схеме рис. 247, в. Тормозные резисторы гт включены между точками А и Б. Позиции реостатного контроллера используются дважды: при вращении вала в двух направлениях Это обеспечивает 34 позиции торможения, начиная со скорости 90 км/ч и кончая скоростью 6 км/ч
При повороте вала реостатного контроллера в положение Вперед вначале усиливается возбуждение двигателей (увеличиваются сопротивления резисторов гш1 и гш2, см. рис. 247, е), а затем выводятся секции резисторов г1т и г2т в направлении, показанном стрелками. При повороте вала в сторону положения Назад главные резисторы г1т и г2т присоединяются параллельно секциям п и г2, а на последних ступенях параллельно группе, состоящей из г1т и ги дополнительно включается резистор ослабления возбуждения гш1. Ступени тормозного резистора переключаются под контролем РУТ, катушки которого включены в цепи каждой группы двигателей. Цепи резисторов гш замыкают контакторы КШ1 и КШ2, а переход на реостатное торможение завершают линейные контакторы ЛК.З и ЛК4. От перегрузок и токов к. з. цепи защищают реле перегрузки РП1-3, РП2-4 и заземления РЗ. Процесс само-
возбуждения на первых позициях реостатного торможения форсируют обмотки подмагничивания OBV—ОВ4', включаемые контактором ТШ, цепь этих обмоток шунтирована защитным резистором г3.
В случае параллельного соединения четырех двигателей может быть применено реостатное торможение с циклическим (перекрестным) соединением обмоток возбуждения, которое электрически устойчиво для определенных сочетаний параметров цепей, однако в этом случае усложняются переключения при переходе с тягового режима на тормозной.
При шести тяговых двигателя х с тремя параллельными цепями применяют двойное циклическое соединение обмоток возбуждения (рис. 247, д), обеспечивающее электрическую устойчивость в случае достаточно равномерного распределения нагрузок между цепями якорей (схема рис. 247, д была применена на электровозах ВЛ19 с реостатным торможением). Применяют также схему реостатного торможения с попарным соединением двигателей (рис 247, ж) и циклическим соединением внутри каждой пары Распределение секций тормозных резисторов при равенстве их сопротивлений позволяет получить в точках Al, В1 и Cl потенциалы, близкие к потенциалам земли. Последовательное соединение групп двигателей выравнивает нагрузки и тормозные моменты двигателей
Силу торможения В машинист регулирует тормозной рукояткой, ступенями, изменяя сопротивление гт Ступени тормозных сопротивлений определяют из условия колебания тормозной силы В в определенных пределах при торможении до остановки. При определении тормозной силы, допускаемой по условиям сцепления, расчетный коэффициент сцепления в целях повышения безопасности движения принимают на 20% меньше, чем при расчете реостатного пуска
Расчет тормозных ступеней обычно выполняют графическим способом (как и ступеней реостатного пуска) на один двигатель. Затем в зависимости от числа тяговых двигателей и схемы их соединения рассчитывают общее сопротивление При построении тормозной диаграммы учитывается ограничение по напряжению на коллекторе тягового двигателя.
Реостатное торможение при независимом возбуждении и противовозбужде-нии тяговых двигателей в генераторном режиме. Эти системы реостатного торможения применяют на современном э п с.
На электровозах и электропоездах переменного тока предусматривают специальный тормозной резистор, не используемый в пусковом режиме, на э.п.с. постоянного тока для реостатного торможения обычно используют пусковой реостат, а для переключения его ступеней — групповой реостатный контроллер, применяемый при пуске. Чтобы не устанавливать специальный реостатный контроллер на э п.с переменного тока, как правило, применяют постоянный нерегулируемый тормозной резистор, а для поддержания постоянной тормозной силы в широком диапазоне скоростей используют противовозбуждение либо регулирование с воздействием на ток возбуждения тяговых двигателей. Обмотки возбуждения двигателей в режиме реостатного торможения питают либо от машинного возбудителя, либо от одной тяговой выпрямительной установки, либо от специально предусмотренной выпрямительной установки возбуждения
При питании обмоток возбуждения ОВ1 и ОВ2 (рис 248, а) двигателей Ml и М2 от возбудителя В или от статического источника энергии с э.д.с. Ев и внутренним сопротивлением го ток возбуждения
h = EJ(rm + г0) = EJrmo,
где гов — сопротивление обмоток возбуждения ОВ1 и ОВ2, гово — суммарное сопротивление цепи.
Для цепи якорей действительно следующее уравнение:
(r.i + гя2 + гту = Я, + Ег = Е = СФо,
где гя1 -4- гя2 — сопротивление обмоток якорей и добавочных полюсов двигателей Ml и М2; I — ток в цепи якорей.
Изменяя сопротивление /-„, регулируют ток iB, а следовательно, э. д. с Ев, токи /в и / и тормозную силу В. В случае ступенчатого регулирования при Ев = const м. д. с. и ток возбуждения постоянны Магнитный поток при изменении тока меняется только вследствие влияния реакции якоря, и зависимость о/ близка к прямолинейной
Тормозная характеристика В(р) определяется зависимостью В{1) и скоростной характеристикой Вид характеристики В(Г) зависит от способа возбуждения тяговых двигателей, а — от характеристики цепи нагрузки. Зависимость В(и) обычно нелинейная, и коэффициент жесткости хв = йВ/йь, оценивающий форму тормозной характеристики, различен для разных ее точек.
Минимальная скорость отіп ограничена максимальным током возбуждения, который может быть допущен по условиям нагрева обмотки возбуждения. Если принять значение СФтах, соответствующее
'вшах. ТО Отіп =/(/-„ + ГТ)/(СФтах).
Следовательно, скорость vmin приблизительно пропорциональна тормозному сопротивлению, и область действия реостатного торможения можно расширить, только снижая гт. Минимальная скорость торможения может быть снижена выведением ступеней тормозного реостата при сохранении максимального тока возбуждения. Однако при этом в дополнение к регулированию возбуждения возбудителя необходимо использовать силовые контакторы для переключения ступеней тормозного резистора.
На локомотиве с машинным возбудителем противовозбуждение создается встречной обмоткой с числом витков ювв (рис. 248, б), через которую протекает ток якорей двигателей М1 и М2. Недостатком схемы рис. 248, б является то, что коэффициент противовозбуждения В„ = —йР/йІ, определяющий жесткость тормозных характеристик, зависит только от конструктивных параметров двига-
телей и возбудителя, что исключает возможность изменения наклона тормозных характеристик.
В случае нескольких тяговых двигателей при независимом возбуждении и противовозбуждении применяют различные схемы реостатного торможения, которые зависят от способа питания цепей обмоток возбуждения тяговых двигателей, управления тормозными процессами, способа противовозбуждения, принятой группировки двигателей и резисторов в тяговом режиме, вида тормозного процесса (одноступенчатый или многоступенчатый) .
Преимущества рассмотренных схем реостатного торможения с самовозбуждением тяговых двигателей заключаются в отсутствии возбудителей, независимости режима торможения от наличия напряжения в контактной сети, а на э. п. с. постоянного тока — в возможности использования пусковых резисторов. К недостаткам этих схем следует отнести ограничение низшей скорости торможения и трудность контроля самовозбуждения при автоматическом управлении. При независимом возбуждении и противовозбуждении устраняются указанные недостатки последовательного возбуждения, обеспечивается устойчивость систем электрического торможения во всем диапазоне рабочих нагрузок и существенно облегчается управление процессом торможения, поскольку выполняется управление воздействием на цепи малой мощности.
Ценное свойство систем с противо-возбуждением — возможность выбора
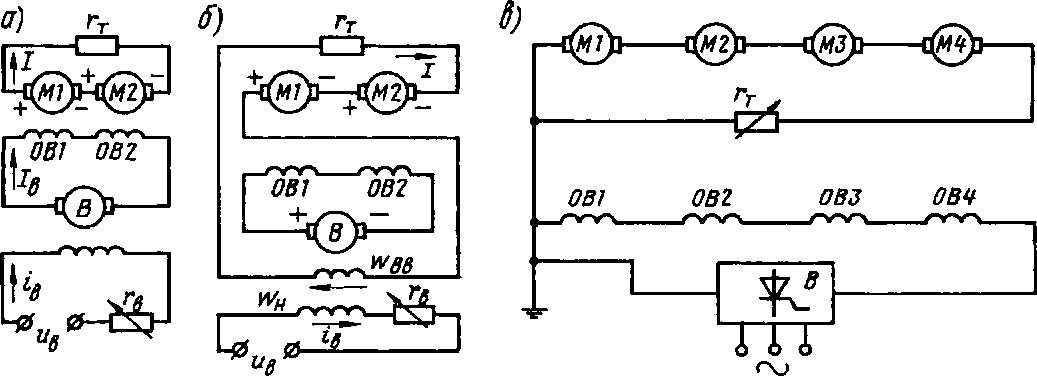
Рис. 248. Принципиальные схемы реостатного торможения при независимом возбуждении (а), противовозбуждении (б) и электропоезда ЭР22В (в)
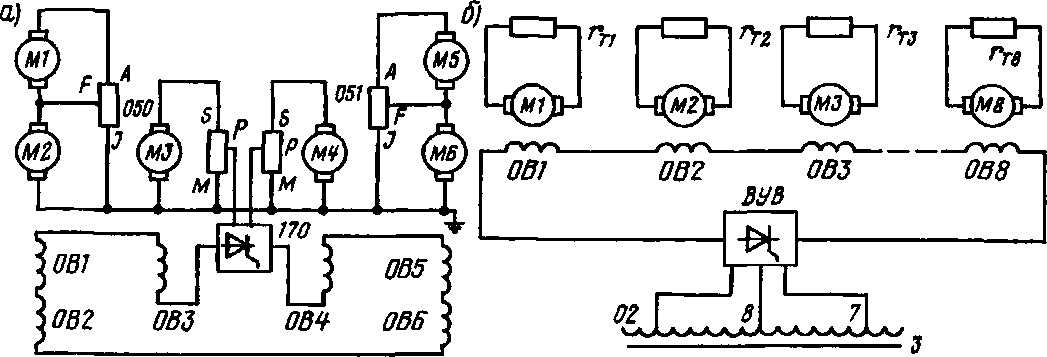
Рис. 249. Принципиальные схемы реостатного торможения электровозов ЧС2Т (а) и ВЛ80Т (б)
оптимальной жесткости характеристик в соответствии с требованиями к режиму торможения. В режиме реостатного торможения разброс нагрузок тяговых машин при равных токах возбуждения невелик; это позволяет питать последовательно соединенные обмотки возбуждения от одного возбудителя В (см. рис. 248, б). Чтобы не устанавливать специальный реостатный контроллер, на э. п. с. переменного тока, как правило, применяют постоянный нерегулируемый тормозной резистор гт; обычно включают каждый якорь на свой резистор.
Преимущество схемы с общим резистором перед схемой с индивидуальными резисторами в цепях якорей двигателей состоит в том, что якоря нагружены одинаково независимо от расхождений характеристик двигателей. Такое соединение четырех двигателей при напряжении на токоприемнике 3000 В применяют и в тяговом режиме, но обмотки включают последовательно с цепью якорей. Недостаток схемы рис. 248, в — повышенная склонность колесных пар к юзу, так как при этом уменьшается жесткость тормозных характеристик.
В случае параллельного соединения групп или отдельных двигателей, включенных на общий тормозной резистор, при независимом возбуждении и проти-вовозбуждении упрощается схема по сравнению со схемой последовательного возбуждения, так как электрическую устойчивость можно обеспечить без принятия специальных мер. Однако параллельное соединение цепей якорей приводит к большой неравномерности их нагрузок, вследствие чего приходится в каж-
дую параллельную ветвь включать добавочные резисторы. Если цепь якоря включена на отдельный тормозной резистор, то отпадает необходимость выравнивать нагрузки параллельных цепей. На электровозе ЧС2Т (рис. 249, а) тиристор-ный возбудитель 170 подключен к выводам Р тормозных резисторов. Ток в обмотках возбуждения двигателей плавно изменяется под действием системы импульсного регулирования напряжения.
На электровозах с тяговыми двигателями пульсирующего тока тормозную силу регулируют, плавно изменяя ток возбуждения, что обеспечивается изменением угла- открытия тиристоров выпрямительной установки возбуждения (ВУВ). Известно много схем плавного автоматического регулирования тормозной силы на э. п. с. На электровозах ВЛ80Т впервые выполнена разработанная МЭИ совместно с ВЭлНИИ система двухрежимного автоматического регулирования, обеспечивающая замедление по установленным ограничениям тормозного режима и подтормаживание на спусках при стабилизированной скорости (рис. 249, б).
При этом системы автоматического регулирования тормозной силы (САРТС) не должны допускать влияния случайного изменения режима работы отдельных тяговых двигателей (например, при юзе и т. д.) на работу системы в целом Обычно это достигается введением в САРТС сигналов обратной связи от нескольких цепей тормозного тока.
Автоматическое регулирование тормозной силы осуществляется регулированием напряжения ВУВ-758. В цепь
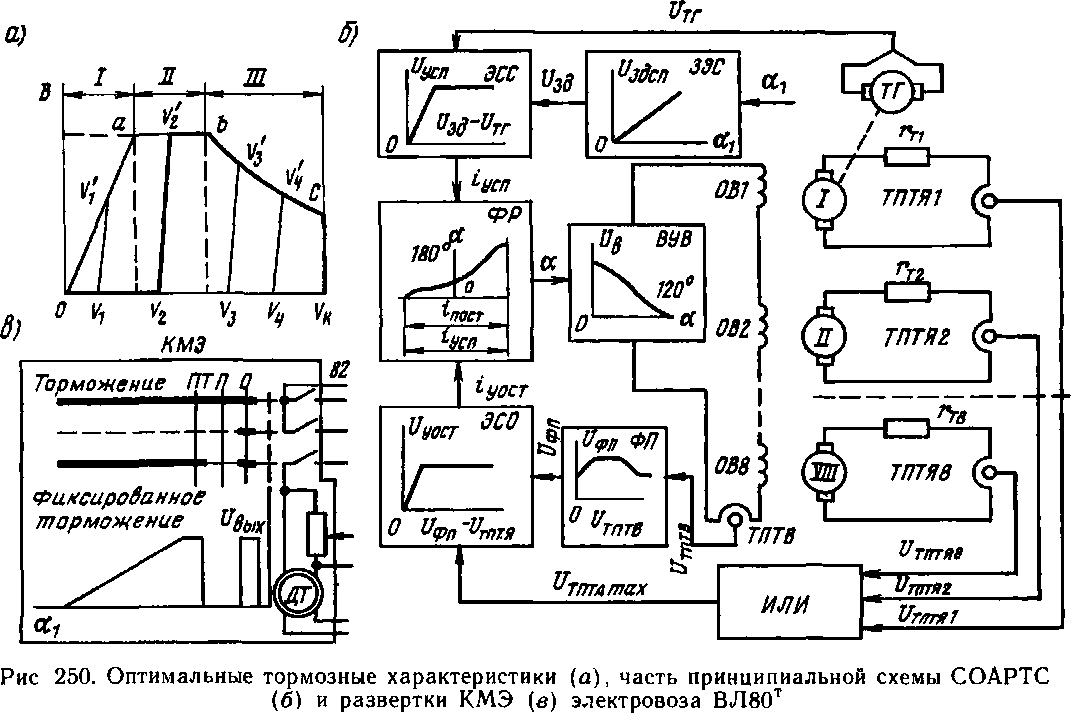
обмоток возбуждения и якорей включены датчики тока — трансформаторы постоянного тока ТПТВ и ТПТЯ1 — ТПТЯ8 (рис. 250, а—в). Система регулирования тормозной силы конструктивно выполнена в виде блока, получившего название БУВ — блок управления возбудителем На каждой секции электровоза установлено по одному блоку. С помощью переключателей можно обеспечить управление тормозным процессом от любого БУВ из любой кабины тормозной, рукояткой, с которой связан ротор сельсина ДТ. Ротор сельсина питается стабильным переменным напряжением 110 В. Изменяя угол поворота тормозной рукоятки а,, машинист меняет угол поворота ротора сельсина, а следовательно, и напряжения на обмотках его статора.
Тормозная рукоятка имеет положения1: 0, П, ПТ, Фиксированное торможение и Торможение. В положении П собирается схема режима реостатного торможения. Перевод рукоятки в положение ПТ приводит к плавному нараста-
1 На электровозах ВЛ80Т до № 784 на контроллере машиниста было предусмотрено ручное управление.
нию тормозной силы электровоза примерно до 100 кН в течение 1—2 с. Когда рукоятка установлена в позицию Фиксированное положение, заданная скорость движения равна конструкционной vк и ток возбуждения двигателей равен нулю. Поворот тормозной рукоятки в сторону положения Торможение до тех пор, пока заданная скорость меньше истинной, вызывает плавное нарастание тока возбуждения.
Статор сельсина имеет три обмотки, линейные напряжения между которыми изменяются по одинаковым законам: между одними оно уменьшается от максимума до нуля при повороте рукоятки ТГ из нулевого положения в предельное, а между другими растет от нуля до максимума. Сельсин является задающим элементом скорости ЗЭС, напряжение выхода изд которого определяется углом поворота Я) рукоятки контроллера машиниста. Это напряжение сравнивается в элементе ЭСС с напряжением тахогенератора ТГ, и их разность подается на вход фазорегулятора ФР.
Напряжения с датчиков ТПТЯ1— ТПТЯ8 подаются на вход логического элемента ИЛИ, пропускающего на выход
максимальный из сигналов напряжения ^тптятах- Благодаря этому случайный юз отдельных колесных пар, приводящий к снижению тормозной силы, не сказывается на работе системы. Напряжение UTnrB датчика тока возбуждения подается на функциональный преобразователь ФП, напряжение с/фп на выходе которого изменяется в зависимости от напряжения на входе. Заданная тормозная характеристика получается, если входное напряжение UrnTB изменяется пропорционально току в цепи якорей тяговых двигателей в зависимости от тока возбуждения. Напряжения ифп и Urmsmax с выходов ФП и элемента ИЛИ подаются на входы элемента сравнения остановки ЭСО, напряжение выхода которого подается на вход фазорегулятора ФР. Последний вырабатывает импульсы, управляющие тиристорами. Фаза импульсов относительно напряжения, питающего выпрямительную установку возбуждения, изменяется в зависимости от значения управляющих сигналов.
Если заданная скорость больше истинной, то в фазорегулятор ФР подается максимальный ток управления iycn, вследствие чего ток возбуждения и тормозная сила отсутствуют. По мере достижения заданной скорости движения ток гусп начинает уменьшаться, а ток возбуждения и тормозная сила — расти.
Система оптимального автоматического регулирования тормозной системы СОАРТС электровоза ВЛ80Т обеспечивает снижение скорости движения по заданным ограничениям в соответствии с линией abc (см. рис. 250, а) или поддержание ее примерно постоянной на спусках (линии v' — v\,v2 — чг.чз — ^з, «4 — v'4). Система также осуществляет разгон поезда по спуску без торможения до заданной скорости движения, например до v2 (линия 0 — о2), затем резко увеличивает тормозную силу В при небольшом увеличении скорости движения (линия v2— v'2). Если при торможении тормозная сила достигает предельного значения по какому-либо ограничению, например по току возбуждения /в, тормозной силе В или току якоря /т, то СОАРТС ограничивает рост тормозной силы В- При дальнейшем росте скорости движения система регулирует силу В по
предельным параметрам, т. е. сама выбирает нужное значение В в зависимости от веса состава и профиля пути. Управление в режиме подтормаживания на спуске сводится к постановке рукоятки ТР в положение, соответствующее разрешенной скорости движения.
Таким образом, система СОАРТС в зависимости от положения тормозной рукоятки дает возможность производить торможение с максимальной тормозной силой до заданного значения скорости с последующей стабилизацией ее, а также разгоняться по спуску без торможения до заданной скорости с последующим ростом тормозной силы.
На электровозах ЧС4Т, ЧС8 тормозную силу регулируют также, как на электровозах ВЛ80Т, ВЛ80С.