§ 79. Контактные системы управления
При управлении электровозом или электропоездом машинисту приходится производить его пуск, разгон, регулировать скорость и изменять направление движения, осуществлять электрическое торможение. Требуемый режим работы локомотива достигается соединением электрических цепей по определенной схеме, изменением параметров этих цепей (сопротивления, напряжения, магнитного потока, частоты и т. д.) и направления тока в обмотках возбуждения или якорей тяговых двигателей. Каждому соединению и сочетанию параметров цепей соответствует определенная тяговая или тормозная характеристика локомотива. Все операции по управлению локомотивом выполняются либо контактными тяговыми аппаратами, осуществляющими требуемые переключения, либо бесконтактными. Если на локомотиве применяют контактные тяговые аппараты, то различают систему с непосредственным управлением и систему с косвенным управлением.
Система с непосредственным управлением. В этом случае электрические аппараты (обычно силовые контроллеры), осуществляющие необходимые переключения в цепи тяговых двигателей, приводят в действие вручную. Переключения в цепи тяговых двигателей М1 и М2 (рис. 229, а) производят барабаном с контактными сегментами и пальцами П (илн кулачковыми шайбами и контакторами). Пальцы П соединены с цепью тяговых двигателей и пускового резистора /?п. При повороте по часовой стрелке рукоятки Р силового контроллера осуществляется подключение к токоприемнику и устанавливается заданный режим работы тяговых двигателей Необходимая последовательность переключений обеспечивается взаимным рас-
положением пальцев и контактных сегментов барабана силового контроллера.
Систему с непосредственным управлением целесообразно применять при сравнительно небольших мощностях двигателей н напряжениях в контактном проводе, так как в противном случае аппаратура управления становится чрезвычайно громоздкой н не обеспечивается выполнение требований техники безопасности. Такую систему применяют на некоторых видах городского электрического транспорта.
Система с косвенным управлением. При этой системе соответствующие электрические аппараты приводятся в действие пневматическими или электромагнитными приводами, которыми управляет машинист на расстоянии (дистанционно) контроллером машиниста КМ (рис. 229, б). Контакты контроллера соединены с проводами цепей управления. Цепи управления магистрального э. п. с. питаются от источника энергии напряжением 50 или 110 В. При этой системе упрощается управление сложными электрнческимн цепями современного э. п. с, в кабине машиниста нет устройств, находящихся под высоким напряжением, упрощается размещение аппаратов управления, становится возможно автоматизировать процессы пуска и торможения.
При системе с косвенным управлением легко осуществить управление из одной кабины машиниста (с одного поста) несколькими электросекцнями нли электровозами при двойной тяге по системе многих единиц. Для этого достаточно соединить параллельно провода цепей управления всех совместно работающих электрических локомотивов. Система с косвенным управлением может быть автоматической и неавтоматической.
Неавтоматической системой с косвенным управлением называют такую, при которой каждое необходимое последо-
вательное переключение в цепи тяговых двигателей осуществляется соответствующими переключениями в цепн управления, производимыми машинистом.
Автоматической системой с косвенным управлением называют систему, где определенный ряд следующих одно за другим переключений в цепи тяговых двигателей с необходимыми' выдержками времени между ними осуществляется специальными аппаратами (обычно реле) без участия машиниста, который, воздействуя на аппарат управления, дает лишь импульс, обеспечивающий возникновение этого ряда переключений.
На моторвагонном подвижном составе, где вес поезда, приходящийся на каждый моторный вагон, меняется в сравнительно в небольших пределах, применяют, как правило, автоматическую систему с косвенным управлением.
На электровозах, где режим работы тяговых двигателей в процессе пуска и торможения приходится изменять в широких пределах в зависимости от веса состава, профиля пути и условий сцепле-
ния, чаще всего применяют неавтоматическую систему с косвенным управлением, которую по конструкции аппаратов разделяют на трн вида: с индивидуальными контакторами, групповыми контакторами и смешанную систему (индивидуально-групповую) .
В системе с индивидуальными контакторами каждый контактор имеет свой привод (пневматический или электромагнитный, подробно см. § 64) и производит простейшую операцию — замыкание и размыкание двух точек цепи. Управление тяговыми двигателями сводится к возбуждению в цепях управления катушек приводов контакторов 5— 13 от контроллера машиниста КМ, к которому подведено напряжение 50 В. Каждой позиции (цифры 0—15 и вертикальные линии под ними) рукоятки контроллера машиниста КМ на рис. 229, б соответствует только одно сочетание положений аппаратов цепи тяговых двигателей М1—М4 Контроллер машиниста по сравнению с силовым контроллером системы непосредственного управления
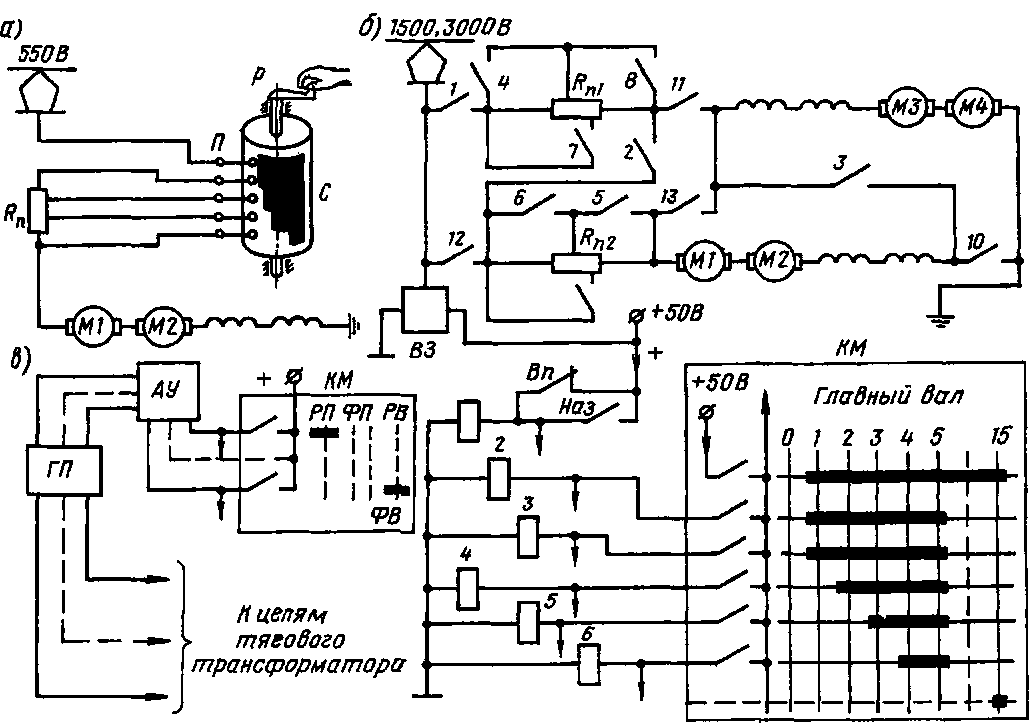
Рис 229. Принципиальные схемы контактних систем управления: а и б — соответственно непосредственного и косвенного управления тяговыми двигателями постоянного тока, а— развертка главного вала контроллера машиниста при системе управления с группо
вым контактором
имеет значительно меньшие размеры благодаря низкому напряжению и малому току в цепи управления.
В системе управления с индивидуальными контакторами для обеспечения строго определенной последовательности их переключений приходится применять большое число электрических блокировок Блокировками приходится связывать и другие аппараты (например, реверсоры блокировки ВП, Наз и др.) для создания максимальной гибкости системы управления и надежности ее действия в эксплуатации. Однако при большом числе таких блокировок они иногда сами являются причиной неисправности системы вследствие, например, окисления или загрязнения контактных частей Поэтому система управления с индивидуальными контакторами не получила распространения на электроподвижном составе магистрального транспорта.
В системе с групповым контактором все контакты, которые замыкают и размыкают секции пускового реостата и переключают цепи тяговых двигателей, конструктивно объединены в один аппарат и управляются общим кулачковым валом В отличие от индивидуальных контакторов, которые имеют только два положения (контакты замкнуты нли разомкнуты), приводы групповых контакторов могут иметь несколько положений, число которых определяется числом ступеней регулирования скорости движения. Необходимая последовательность действия контакторов в этой системе определяется соответствующей конфигурацией и относительным угловым смешением на кулачковом валу кулачковых шайб; при этом не требуется применять электрические блокировки между контакторами.
Система с групповыми контакторами допускает легкую и простую автоматизацию управления, например, в зависимости от тока (на электропоездах ЭР1, ЭР2 и др., подробно см. § 101). В этом случае управляющим элементом является электромагнитное реле ускорения, высоковольтная катушка которого включена в цепь тяговых двигателей, а контакты — в цепь катушек вентилей привода реостатного контроллера. Когда ток в цепи тяговых двигателей больше
тока уставки реле ускорения, его якорь притянут, а контакт в цепи катушек вентилей разомкнут. По мере разгона поезда ток двигателей уменьшается, и при токе уставки (например, около 175 А) якорь реле ускорения отпадает, замыкается его контакт в цепи катушек вентилей, вал реостатного контроллера поворачивается, и из цепи тяговых двигателей выводятся секции пускового реостата. Так обеспечивается автоматический пуск поезда с поддержанием определенного тока уставки при групповом контакторе с пневматическим приводом Л. Н Ре-шетова. При этом главный вал контроллера машиниста имеет несколько положений, на которых машинист подает однотипные импульсы для срабатывания определенной группы аппаратов.
В сложных схемах электрических цепей электровозов постоянного тока при большом количестве контакторов, большом числе позиций разгона и наличии электрического торможения применять групповые системы затруднительно вследствие неудобства объединения в один аппарат большого числа контакторов Групповые контакторы должны иметь столько позиций кулачкового вала, сколько требуется для разгона и электрического торможения. Число таких позиций для некоторых электровозов, например, постоянного тока с электрическим торможением составляет 51—57; привод и кулачковый вал в этом случае получаются чрезмерно сложными. Поэтому на магистральных электровозах постоянного тока отечественного производства получила распространение смешанная индивидуально-групповая система управления, в которой применяют индивидуальные электропневматическне контакторы для переключения пусковых резисторов и групповые контакторы для переключения тяговых двигателей с одного соединения на другое, управления возбуждением, реверсирования и др. При системе с индивидуальными контакторами это потребовало бы сложной системы взаимной их блокировки.
Смешанная система управления сохраняет гибкость системы с индивидуальными контакторами и вместе с тем освобождает цепи управления от большого числа блокировок. Такой является
система шагового управления, где пуск осуществляется качанием главной рукоятки контроллера машиниста КМ между положениями ФП («Фиксация пуска») и РП («Ручной пуск»). При каждом перемещении рукоятки в положение РП и обратно на ФП с помощью аппаратуры управления АУ система переходит на одну ступень. Для перехода с высших ступеней на низшие предусматривают положение ФВ («Фиксация выключения») и РВ («Ручное выключение», рис. 229, в). Эту систему применяют на отечественных электровозах переменного тока. К смешанным системам управления относят и систему с индивидуальными контакторами, которыми управляет многопозиционный промежуточный контроллер управления, задающий необходимую последовательность действия индивидуальных контакторов. В свою очередь промежуточным контроллером, снабженным серводвигателем, машинист управляет с помощью основного контроллера управления. Подобную систему имеют пассажирские электровозы постоянного тока ЧС2Т и ЧС200, ЧС6 и ЧС7.